I.MX6ULL开发指南
开发环境搭建
虚拟机安装
- 下载安装VMware Workstation Pro工具。
- 下载安装ubuntu 20.04 LTS系统镜像。
- 快速创建虚拟机。
- 配置虚拟机环境。
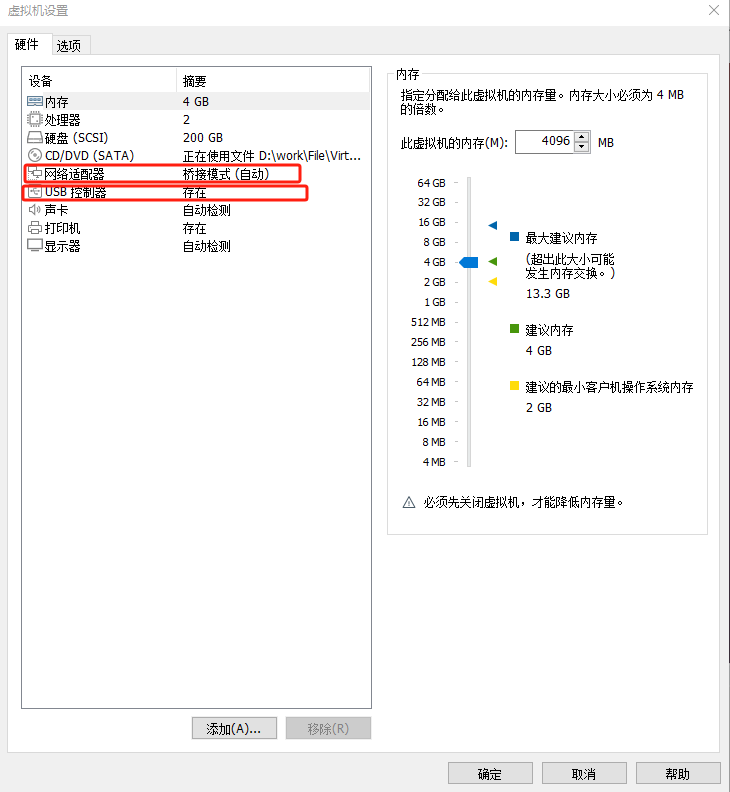
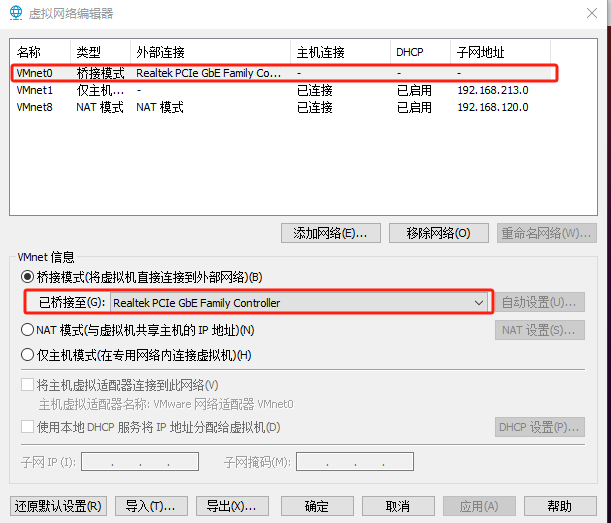
虚拟机-设置(见以下图片):
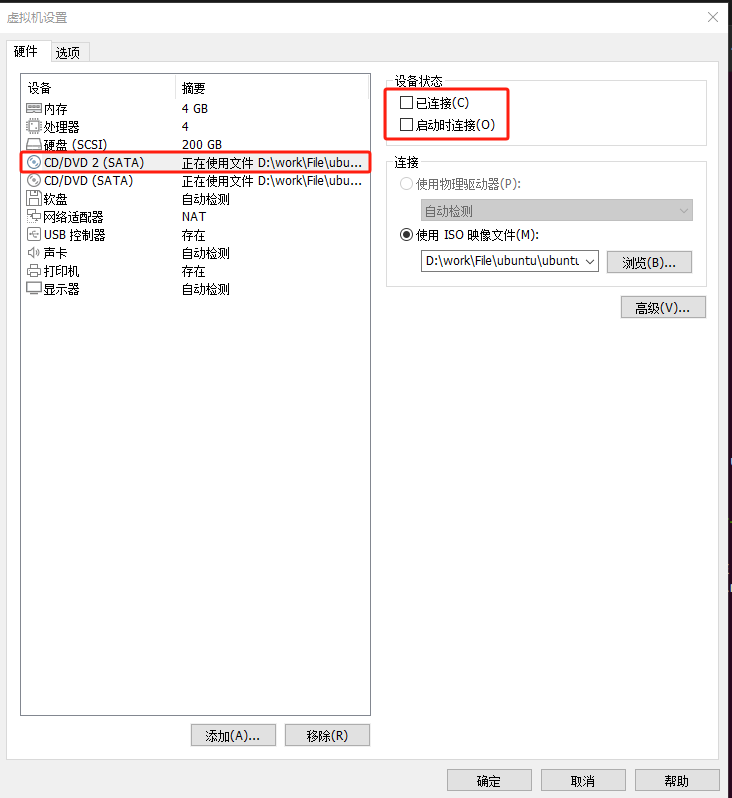
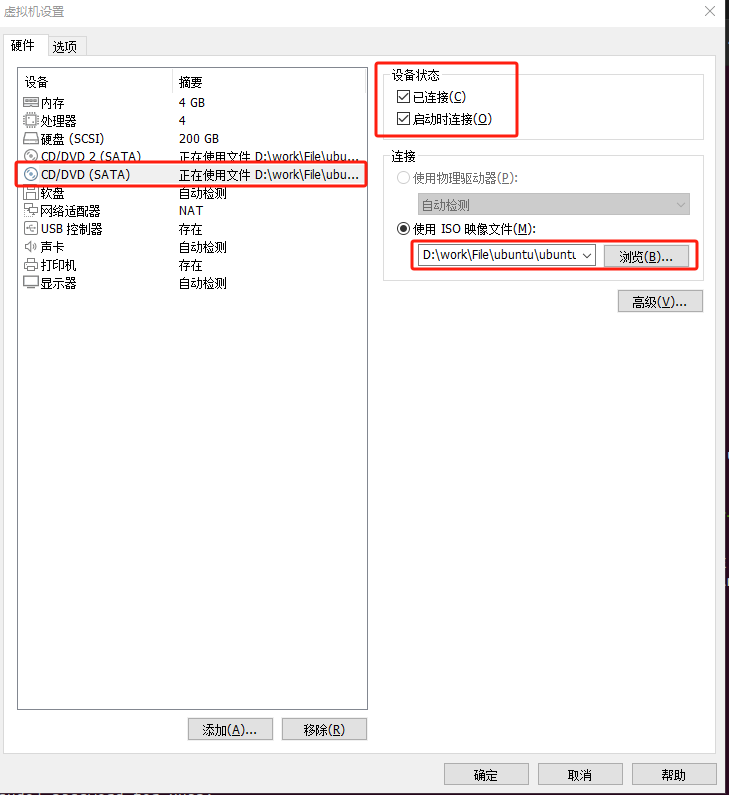
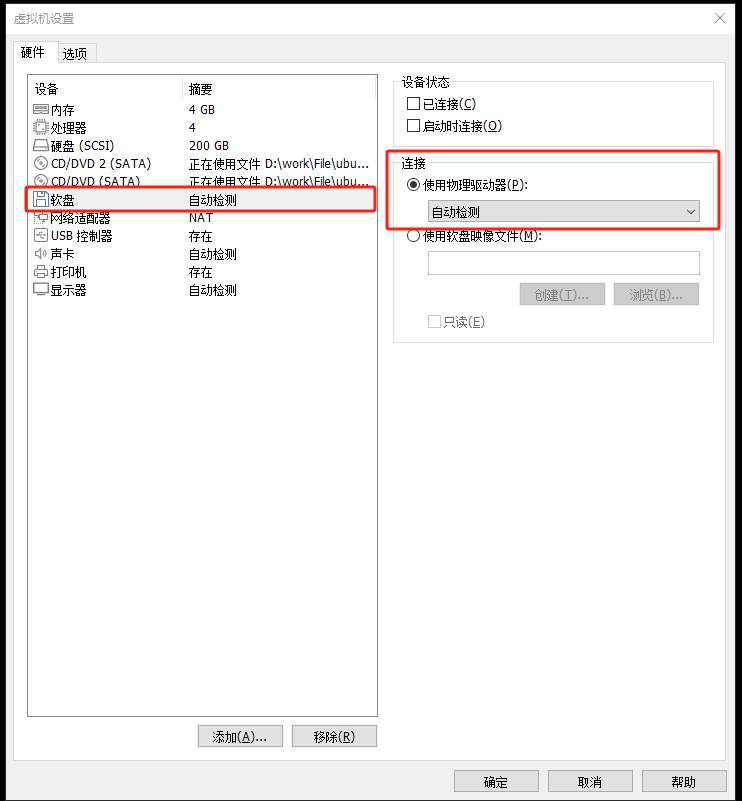
网络适配器可按自己需要设置。
- 启动虚拟机,进入
ubuntu系统。
进入系统后会自动弹出
DVD, 里面有VMware Tools的压缩包。复制压缩包到
Donwnloads目录下,解压。执行
sudo ./vmware-install.pl安装。解决Windows和Ubuntu之间复制粘贴问题。
- 输入安装命令:sudo apt install open-vm-tools
- 输入命令:sudo apt install open-vm-tools-desktop
注意:输入第一条命令后,等待安装,遇到选择Y/N,选择Y;第一条安装完成后,输入第二条命令,同样遇到选择Y/N,选择Y。
安装完毕后,切记:一定要重新启动Linux系统才可以双向复制粘贴。
虚拟机安装配置遇到的问题
- 尝试解决无法使用桥接使用与PC机相同IP上网
- 虚拟网络编辑器-还原默认设置(该过程会卸载虚拟网卡,重新安装适配器)
- 桥接模式启动
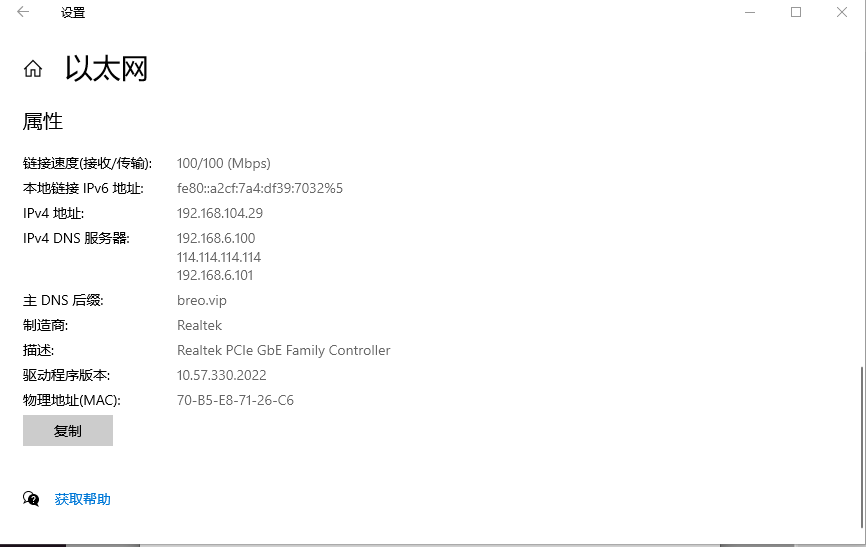
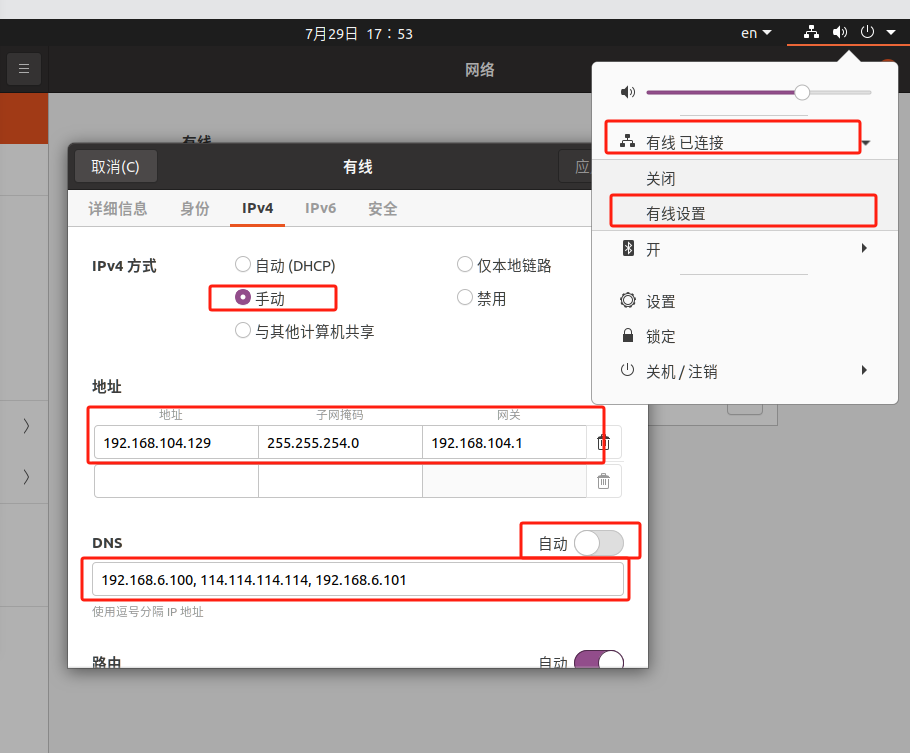
- 笔试还不能关闭网络服务,
ubuntu内部配置IPv4(先打开PC主机以太网,按下图所示手动填写地址和DNS),重新启动网络服务。
- 虚拟机右下角的USB是灰的,不能链接/断开。
Uboot移植
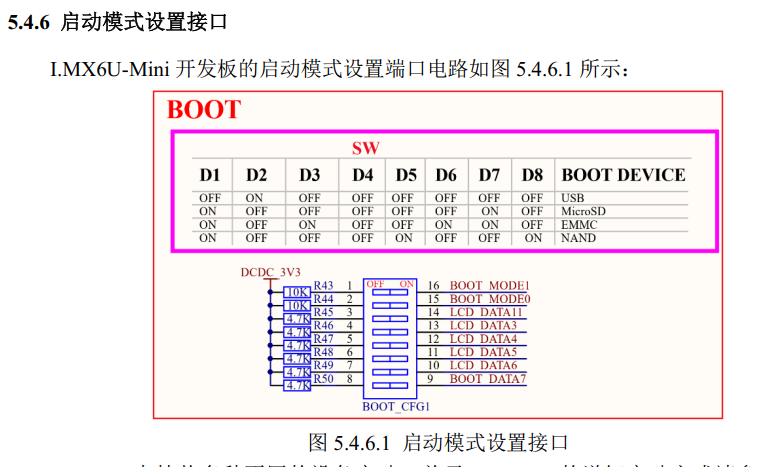
I.MX6ULL启动模式
Uboot编译烧录
将
uboot压缩文件uboot-imx-rel_imx_4.1.15_2.1.1_ga_alientek_v2.4.tar.bz2放到/home/xuan/linux/目录下。将
uboot文件tar -xjvf uboot-imx-rel_imx_4.1.15_2.1.1_ga_alientek_v2.4.tar.bz2解压到该目录下。cd /home/xuan/linux/uboot-imx-rel_imx_4.1.15_2.1.1_ga_alientek_v2.4编写以下脚本:(
mx6ull_14x14_evk_emmc.sh)1
2
3
4!/bin/bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_alientek_emmc_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- V=1 -j12执行脚本:
./mx6ull_14x14_evk_emmc.sh
Uboot烧录到SD卡
插上
SD卡,启动uboot,SD卡和EMMC驱动检查:1
2
3
4
5mmc dev 0
mmc info
mmc dev 1
mmc info烧写验证与驱动测试
- 挂载
SD卡,不做描述,挂载上之后ls /dev/sd*显示。 - 执行以下
shell指令。1
2
3cd ~/linux/uboot-alientek-v2.4 //进入uboot文件夹
chmod 777 imxdownload //给予 imxdownload 可执行权限
./imxdownload u-boot.bin /dev/sdb //烧写到 SD 卡中,不能烧写到/dev/sda 或 sda1 里面
- 挂载
U-Boot图形化配置
1 | sudo apt-get install build-essential |
- 配置网口的环境变量,开发板上的
ENET2,上电进入uboot,打开的USB_TTL对应的串口控制台。1
2
3
4
5
6
7env default -a;saveenv //default好像有问题
setenv ipaddr 192.168.104.130 //开发板 ip 地址
setenv ethaddr b8:ae:1d:01:00:00 //开发板的MAC地址,一定要设置, 如有多块开发板,MAC需不一致
setenv gatewayip 192.168.104.1 //网关地址
setenv netmask 255.255.240.0 //子网掩码
setenv serverip 192.168.104.129 //服务器 IP 地址,也就是 Ubuntu 主机 IP 地址,用于调试代码。
saveenv
Linux内核移植
移植步骤
1. Ubuntu下搭建网络传输环境
1.1 搭建网络tftp服务
执行以下指令,安装
xinetd:1
sudo apt-get install xinetd
查询
/etc/下是否存在xinetd.conf文件,没有的话则自己新建一个。1
2ls /etc/xinetd.conf
sudo vi /etc/xinetd.conf创建出来的文件是空白的, 修改
xinetd.conf文件内容如下:1
2
3
4
5
6
7
8
9
10Simple configuration file for xinetd
# Some defaults, and include /etc/xinetd.d/
defaults
{
Please note that you need a log_type line to be able to use log_on_success
and log_on_failure. The default is the following :
log_type = SYSLOG daemon info
}
includedir /etc/xinetd.d新建
TFTP目录,这里建立在/home/xuan/linux 目录下,目录名为 tftp。将 tftp 目录赋予可读可写可执行权限。
1 | mkdir -p /home/xuan/linux/tftp |
执行以下程序安装
tftp-hpa和tftpd-hpa服务程序1
2sudo apt-get install tftp-hpa tftpd-hpa
sudo vi /etc/default/tftpd-hpa执行以下指令创建
/etc/xinetd.d/tftp配置文件。(如果没有xinetd.d这个目录,可以先自己手动创建),注意server_args = -s后面要添加自己的tftp工作路径。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15server tftp
{
socket_type = dgram
wait = yes
disable = no
user = root
protocol = udp
server = /usr/sbin/in.tftpd
server_args = -s /home/xuan/linux/tftp -c
log_on_success += PID HOST DURATION
log_on_failure += HOST
per_source = 11
cps =100 2
flags =IPv4
}修改/添加
tftp文件后, 执行以下指令重启tftpd-hpa, 重启xinetd服务。1
2sudo service tftpd-hpa restart
sudo service xinetd restart确保网络环境正常,
Ubuntu、Windows和开发板能相互ping通。- 开发板 IP: 192.168.104.130
- 虚拟机 IP: 192.168.104.129
- 电脑网口的 IP: 192.168.104.29
1.2 搭建网络nfs服务
在
Ubuntu终端执行以下指令安装NFS1
sudo apt-get install nfs-kernel-server
新建
NFS共享目录,并给予NFS目录可读可写可执行权限。1
2sudo mkdir /home/xuan/linux/nfs
sudo chmod 777 /home/xuan/linux/nfs/执行以下指令打开
etc/exports文件1
sudo vi /etc/exports
进入
etc/exports文件,在最后添加如下内容1
/home/alientek/linux/nfs *(rw,sync,no_root_squash)
/home/alientek/linux/nfs 表示 NFS 共享的目录*表示允许所有的网络段访问rw 表示访问者具有可读写权限sync 表示将缓存写入设备中,可以说是同步缓存的意思no_root_squash 表示访问者具有 root 权限。
执行以下指令重启
NFS服务器, 查看NFS共享目录。1
2sudo /etc/init.d/nfs-kernel-server restart
showmount -e设置
NFS服务开机自启1
2sudo systemctl enable nfs-kernel-server
sudo reboot测试
NFS服务,执行以下指令设置开发板IP,创建一个get目录,将虚拟机(192.168.104.129)NFS共享目
录挂载到到开发板的get目录中。1
2mkdir get
mount -t nfs -o nolock,nfsvers=3 192.168.104.129:/home/xuan/linux/nfs get/查看挂载的
NFS目录:df, 显示如下:1
192.168.104.129:/home/xuan/linux/nfs 204795392 14416896 179902464 8% /home/root/get
卸载
NFS目录:umount get
2. 拷贝内核文件
将内核压缩文件
linux-imx-rel_imx_4.1.15_2.1.1_ga_alientek_v2.4.tar.bz2放到/home/xuan/linux/linux-imx-rel_imx_4.1.15_2.1.1_ga_alientek_v2.4目录下。将内核文件
tar -xjvf linux-imx-rel_imx_4.1.15_2.1.1_ga_alientek_v2.4.tar.bz2解压到该目录下。
3. 编译内核文件
按以下步骤进行编译:
1 | make clean //第一次编译 Linux 内核之前先清理一下 |
发现编译报错:
1 | LZO arch/arm/boot/compressed/piggy.lzo |
解决方法:
- 安装lzop:sudo apt install lzop
- 添加lzop到环境变量:export PATH=$PATH:/usr/bin(直接安装的不需要添加环境变量)
- 重新编译:make -j16
- 若执行
./mx6ull_alientek_emmc.sh
发现编译报错:
1 | <command-line>: fatal error: curses.h: 没有那个文件或目录 |
解决方法:
- 执行
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig后报错fatal error:curses.h:没有那个文件或目录,这个是少了某个库,执行如下指令安装库:1
sudo apt-get install libncurses*
4. 整理编译后的镜像文件
Linux 内核编译完成以后会在 arch/arm/boot 目录下生成 zImage 镜像文件,如果使用设备树
的话还会在 arch/arm/boot/dtb 目录下开发板对应的.dtb(设备树)文件,比如 imx6ull-alientek-emmc.dtb
就是 NXP 官方的 I.MX6ULL EVK开发板对应的设备树文件。至此我们得到两个文件:
Linux内核镜像文件:zImage。NXP官方I.MX6ULL EVK开发板对应的设备树文件: imx6ull-alientek-emmc.dtb。
5. 内核启动测试
修改
uboot中的环境变量bootargs1
console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw
将上一小节编译出来的
zImage和imx6ull-alientek-emmc.dtb复制到Ubuntu中的tftp目录下,
因为我们要在uboot中使用tftp命令将其下载到开发板中,拷贝命令如下:1
2cp arch/arm/boot/zImage /home/xuan/linux/tftpboot/ -f
cp arch/arm/boot/dtb/imx6ull-alientek-emmc.dtb /home/xuan/linux/tftpboot/ -f拷贝完成以后就可以测试了,启动开发板,进入
uboot命令行模式,然后输入如下命令将zImage和imx6ull-alientek-emmc.dtb下载到开发板中:
从tftp启动:
1 | tftp 80800000 zImage |
从EMMC启动:
1 | fatload mmc 1:1 80800000 zImage |
或者在uboot中保存环境变量:
1 | setenv bootcmd 'mmc dev 1;fatload mmc 1:1 80800000 zImage;fatload mmc 1:1 83000000 imx6ull-alientek-emmc.dtb;bootz 80800000 - 83000000' |
从网络启动Linux系统
使用tftpboot启动传输。
- 拨码到从
SD卡启动,开发板上电/RESET,进入uboot。 - 在
uboot配置bootargs和bootcmd参数并保存。
1 | //`root=/dev/mmcblk1p2 rootwait rw` 为使用 eMMC 中已有的根文件系统 |
- 输入
boot启动
使用nfs挂载rootfs。
- 拨码到从
SD卡启动,开发板上电/RESET,进入uboot。 - 在
uboot配置bootargs参数并保存。1
2setenv bootargs 'console=ttymxc0,115200 root=/dev/nfs nfsroot=192.168.104.129:/home/xuan/linux/nfs/rootfs,proto=tcp rw ip=192.168.104.130:192.168.104.129:192.168.104.1:255.255.240.0::eth0:off' //设置 bootargs
saveenv //保存环境变量 - 输入
boot启动
Error solving
[参考资料]:https://blog.csdn.net/weixin_44256228/article/details/113830253)
- 显示挂载失败,一大堆错误,显示没挂载上
IMX6ULL通过NFS挂载根文件系统失败的方法- 修改
/etc/default/nfs-kernel-server1
sudo vi /etc/default/nfs-kernel-server
- 修改
nfs-kernel-server文件修改内容如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21Number of servers to start up
RPCNFSDCOUNT=8
RPCNFSDCOUNT="-V 2 8"
Runtime priority of server (see nice(1))
RPCNFSDPRIORITY=0
Options for rpc.mountd.
If you have a port-based firewall, you might want to set up
a fixed port here using the --port option. For more information,
see rpc.mountd(8) or http://wiki.debian.org/SecuringNFS
To disable NFSv4 on the server, specify '--no-nfs-version 4' here
RPCMOUNTDOPTS="--manage-gids"
RPCMOUNTDOPTS="-V 2 --manage-gids"
Do you want to start the svcgssd daemon? It is only required for Kerberos
exports. Valid alternatives are "yes" and "no"; the default is "no".
NEED_SVCGSSD=""
Options for rpc.svcgssd.
RPCSVCGSSDOPTS="--nfs-version 2,3,4 --debug --syslog"- 重启NFS服务器
1
sudo service nfs-kernel-server restart
- 重新开机挂载,问题解决。
Linux驱动开发
老字符驱动开发(手动创建节点)
led驱动的Makefile文件如下:1
2
3
4
5
6
7
8KERNELDIR := /home/xuan/linux/linux-ga
CURRENT_PATH := $(shell pwd)
obj-m := led.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) cleanmake编译, 生成led.ko文件, 这个是内核模块(Kernel Module)文件,很重要。编译
app文件,输入如下命令:
arm-linux-gnueabihf-gcc ledApp.c -o ledApp复制到
rootfs中,若没有rootfs/lib/modules/4.1.15/,先建立文件夹,输入如下命令:1
2mkdir -p /home/xuan/linux/nfs/rootfs/lib/modules/4.1.15/
sudo cp led.ko led /home/xuan/linux/nfs/rootfs/lib/modules/4.1.15/ -fnfs挂载rootfs,进入开发板1
cd /lib/modules/4.1.15
1
2
3
4depmod //第一次加载驱动的时候需要运行此命令
insmod led.ko
或者
modprobe led.ko //加载 led.ko 驱动文件1
2
3
4cat /proc/devices //查看当前系统中有没有 led 这个设备
mknod /dev/led c 200 0 //创建设备节点文件
./ledApp /dev/led 1 //亮灯
./ledApp /dev/led 0 //灭灯1
2
3rmmod led.ko
或者
modprobe -r led.ko //卸载 led.ko 驱动文件
老字符驱动开发(自动创建节点)
编写
Makefile文件1
2
3
4
5
6
7
8
9
10
11
12KERNELDIR := /home/xuan/linux/linux-ga
CURRENT_PATH := $(shell pwd)
obj-m := newchrled.o
build: kernel_modules
kernel_modules:
(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean编译出驱动模块文件,编译成功以后就会生成一个名为
newchrled.ko的驱动模块文件1
2
3
4cd ~/linux/drivers/03_newchrled
make -j32
arm-linux-gnueabihf-gcc ledApp.c -o ledApp
cp ledApp newchrled.ko ~/linux/nfs/rootfs/lib/modules/4.1.15重新上电运行开发板
1
2
3
4
5
6
7cd /lib/modules/4.1.15
depmod //第一次加载驱动的时候需要运行此命令
modprobe newchrled.ko //加载驱动
ls /dev/newchrled -l //查看/dev/newchrdev 这个设备节点文件是否存在
./ledApp /dev/newchrled 1 //打开 LED 灯
./ledApp /dev/newchrled 0 //关闭 LED 灯
rmmod newchrled.ko
Linux 设备树
以LED点灯驱动为例主要步骤:
- 修改设备树(.dts文件),跟根节点下添加设备子节点,子节点添加属性,举例:
1
2
3
4
5
6
7
8
9
10
11alphaled {
compatible = "atkalpha-led";
status = "okay";
reg = < 0X020C406C 0X04 /* CCM_CCGR1_BASE */
0X020E0068 0X04 /* SW_MUX_GPIO1_IO03_BASE */
0X020E02F4 0X04 /* SW_PAD_GPIO1_IO03_BASE */
0X0209C000 0X04 /* GPIO1_DR_BASE */
0X0209C004 0X04 >; /* GPIO1_GDIR_BASE */
}; - 在
linux目录下重新编译设备树:make dtbs - 编译完成以后得到
imx6ull-alientek-emmc.dtb,使用新的imx6ull-alientek-emmc.dtb启动Linux内核 Linux启动成功以后进入到/proc/device-tree/目录中查看是否有alphaled这个节点,若没有则修改失败- 编写
dtsled.c文件和文件ledApp.c,修改Makefile中的KERNELDIR参数为/home/xuan/linux/linux-ga1
2make -j32
arm-linux-gnueabihf-gcc ledApp.c -o ledApp - 编译出来的
dtsled.ko和ledApp这两个文件拷贝到rootfs/lib/modules/4.1.15目录中,重启开发板,进入到目录lib/modules/4.1.15中,输入如下命令加载dtsled.ko驱动模块:1
2
3
4
5depmod //第一次加载驱动的时候需要运行此命令
modprobe dtsled.ko //加载驱动
./ledApp /dev/dtsled 1 //打开 LED 灯
./ledApp /dev/dtsled 0 //关闭 LED 灯
rmmod dtsled.ko
pinctrl 和 gpio 子系统实验
pinctrl 子系统介绍
pinctrl 子系统主要工作内容如下:
- 获取设备树中
pin信息。 - 根据获取到的
pin信息来设置pin的复用功能 - 根据获取到的
pin信息来设置pin的电气特性,比如上/下拉、速度、驱动能力等。
对于我们使用者来讲,只需要在设备树里面设置好某个 pin 的相关属性即可,其他的初始化工作均由 pinctrl 子系统来完成, pinctrl 子系统源码目录为 drivers/pinctrl。
设备树中添加 pinctrl 节点模板
- 创建对应的节点,打开
imx6ull-alientek-emmc.dts,在iomuxc节点中的imx6ul-evk子节点下添加 “pinctrl_test” 节点 - 添加 “
fsl,pins” 属性,名字一定要为“fsl,pins”,因为对于I.MX系列SOC而言,pinctrl驱动程序是通过读取“fsl,pins”属性值来获取PIN的配置信息
1 | pinctrl_test: testgrp { |
- 至此,我们已经在
imx6ull-alientek-emmc.dts文件中添加好了test设备所使用的PIN配置信息。
gpio子系统
gpio实验
添加
pinctrl节点, ,打开imx6ull-alientekemmc.dts,在iomuxc节点的imx6ul-evk子节点下创建一个名为“pinctrl_led”的子节点1
2
3
4
5pinctrl_led: ledgrp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x10B0 /* LED0 */
>;
};添加
LED设备节点, 在根节点“/”下创建LED灯节点,节点名为“gpioled”1
2
3
4
5
6
7
8
9gpioled {
compatible = "atkalpha-gpioled";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_led>;
led-gpio = <&gpio1 3 GPIO_ACTIVE_LOW>;
status = "okay";
};检查
PIN是否被其他外设使用- 检查
pinctrl设置。 - 如果这个
PIN配置为GPIO的话,检查这个GPIO有没有被别的外设使用。
- 检查
在本章实验中
LED灯使用的PIN为GPIO1_IO03,在imx6ull-alientek-emmc.dts中,先检查GPIO_IO03这个PIN有没有被其他的pinctrl节点使用。如别的模块有使用到
GPIO_IO03,需要注释掉。
Linux 蜂鸣器实验
打开
imx6ull-alientekemmc.dts,在iomuxc节点的imx6ul-evk子节点下创建一个名为“pinctrl_beep”的子节点1
2
3
4
5pinctrl_beep: beepgrp {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER1__GPIO5_IO01 0x10B0 /* beep */
>;
};在根节点“
/”下创建BEEP节点,节点名为“beep”1
2
3
4
5
6
7
8
9beep {
compatible = "atkalpha-beep";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_beep>;
beep-gpio = <&gpio5 1 GPIO_ACTIVE_HIGH>;
status = "okay";
};检查
PIN是否被其他外设使用蜂鸣器驱动程序编写
编写测试
APP编译驱动程序:
make -j32编译测试
APP:arm-linux-gnueabihf-gcc beepApp.c -o beepApp开发板运行测试
1
2
3
4
5depmod //第一次加载驱动的时候需要运行此命令
modprobe beep.ko //加载驱动
./beepApp /dev/beep 1 //打开蜂鸣器
./beepApp /dev/beep 0 //关闭蜂鸣器
rmmod beep.ko