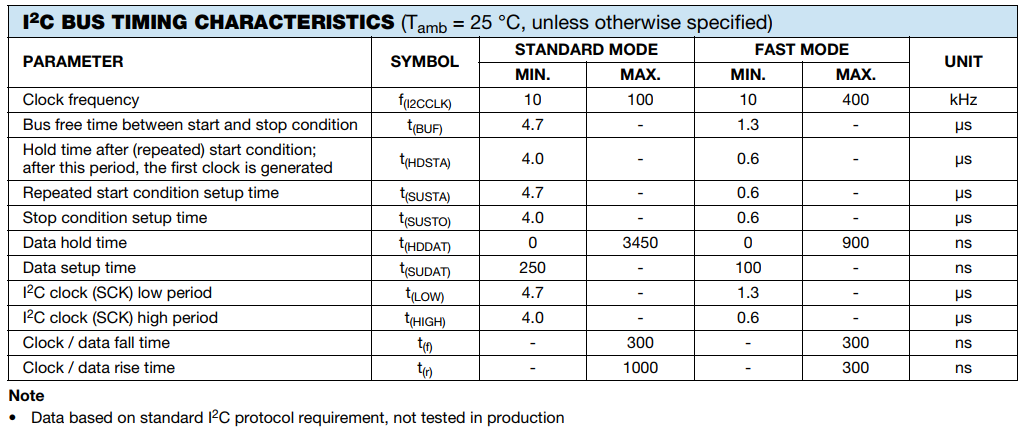
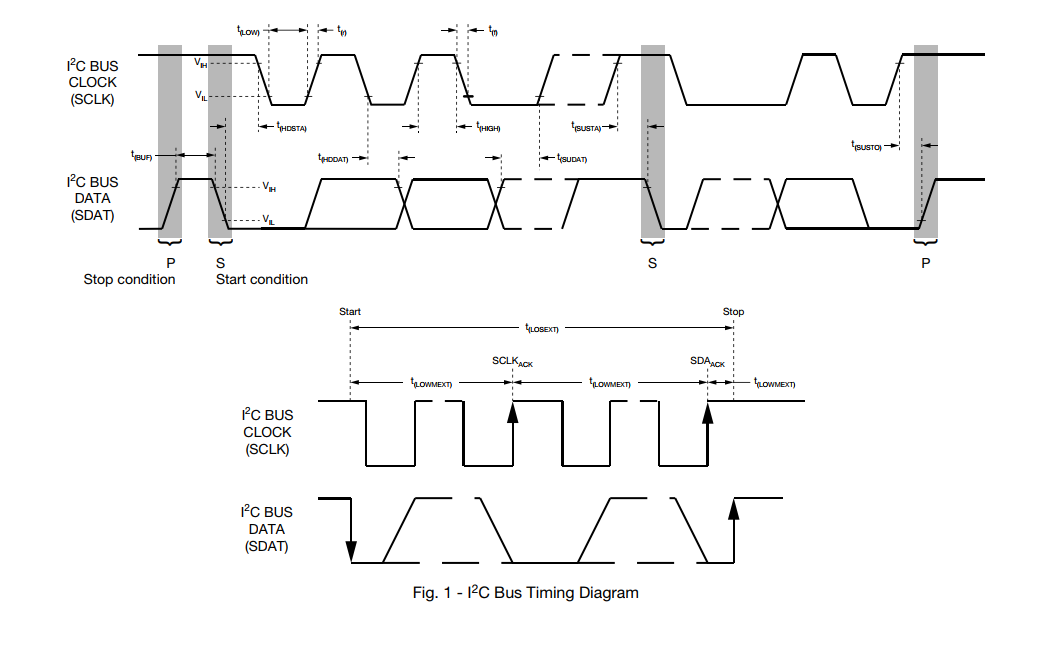
I2C基本原理介绍 时序介绍 参考Vishay的i2c时序图:
代码实现详解 I2C协议实现有硬件I2C和软件I2C之分,这里只讲解软件I2C实现的版本。一下列出主要结构体和初始化函数。
I2C协议初始化 I2C协议的scl和sda配置为开漏输出,需要外部上拉(一般为10K电阻)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 typedef enum{ EI2C_DEV_1 = 1, EI2C_DEV_2, EI2C_DEV_3 }EI2C_DEVICE; struct drv_soft_i2c_config { uint8_t scl; uint8_t sda; uint8_t i2c_num; }; struct drv_i2c_msg { uint16_t addr; uint16_t flags; uint16_t len; uint8_t reg_addr; uint8_t *buf; }; struct drv_i2c_bit_ops { void *data; /* private data for lowlevel routines */ void (*set_sda)(void *data, int state); void (*set_scl)(void *data, int state); int (*get_sda)(void *data); int (*get_scl)(void *data); void (*udelay)(uint32_t us); uint32_t delay_us; /* scl and sda line delay */ uint32_t timeout ; /* in tick */ }; struct drv_i2c_bus_device { struct drv_i2c_msg msg; struct drv_i2c_bit_ops ops; }; static void drv_i2c_gpio_init(struct drv_soft_i2c_config *i2c) { struct drv_soft_i2c_config* cfg = i2c; i2c_pin_mode(cfg->scl, I2C_PIN_MODE_OUTPUT_OD); //PIN_MODE_OUTPUT i2c_pin_mode(cfg->sda, I2C_PIN_MODE_OUTPUT_OD); i2c_pin_write(cfg->scl, I2C_PIN_HIGH); i2c_pin_write(cfg->sda, I2C_PIN_HIGH); } int drv_hw_i2c_init(EI2C_DEVICE dev_e) { int size = sizeof(i2c_pin_config)/sizeof(struct drv_soft_i2c_config); struct drv_i2c_bus_device *dev = get_i2c_device(dev_e); uint8_t dev_num = (uint8_t)dev_e; struct drv_soft_i2c_config *pin_cfg = NULL; struct drv_i2c_bit_ops *ops = &dev->ops; for (int i=0;i<size;i++) { if (i2c_pin_config[i].i2c_num == dev_num) { pin_cfg = (struct drv_soft_i2c_config *)&i2c_pin_config[i]; break ; } } if (pin_cfg == NULL) return -1; ops->data = (void*)pin_cfg; ops->set_sda = n32_set_sda; ops->set_scl = n32_set_scl; ops->get_sda = n32_get_sda; ops->get_scl = n32_get_scl; ops->udelay = n32_udelay; ops->delay_us = 1; ops->timeout = 5; drv_i2c_gpio_init(pin_cfg); drv_i2c_bus_unlock(pin_cfg); return 0; }
接口函数 1 2 3 4 5 6 7 8 int drv_i2c_bit_xfer(struct drv_i2c_bit_ops *bus, struct drv_i2c_msg msgs[], uint32_t num); struct drv_i2c_bus_device *get_i2c_device(EI2C_DEVICE dev_e); static uint64_t i2c_tick_get(void); int drv_hw_i2c_init(EI2C_DEVICE dev_e); int drv_i2c_send_data(EI2C_DEVICE dev_e,uint16_t addr,uint8_t reg_addr,uint8_t *buf,uint16_t len); int drv_i2c_recv_data(EI2C_DEVICE dev_e,uint16_t addr,uint8_t reg_addr,uint8_t *buf,uint16_t len);
实战开发问题分析 实际开发过程中,同样的I2C驱动程序,在不同厂家芯片的使用上出现一些问题,导致部分厂家通信异常,导致数据接收不正确,以下进行分析对比,作证并解决问题。
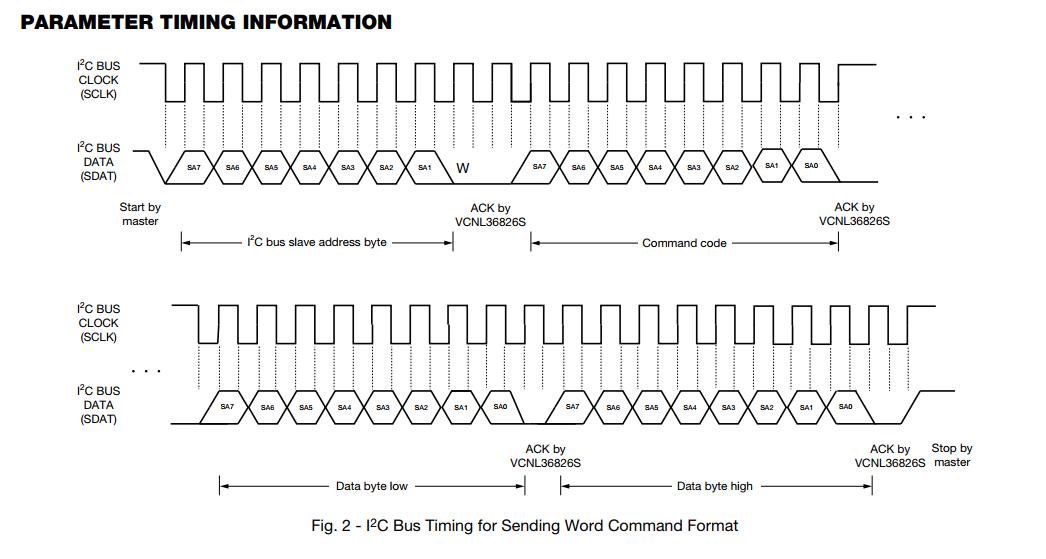
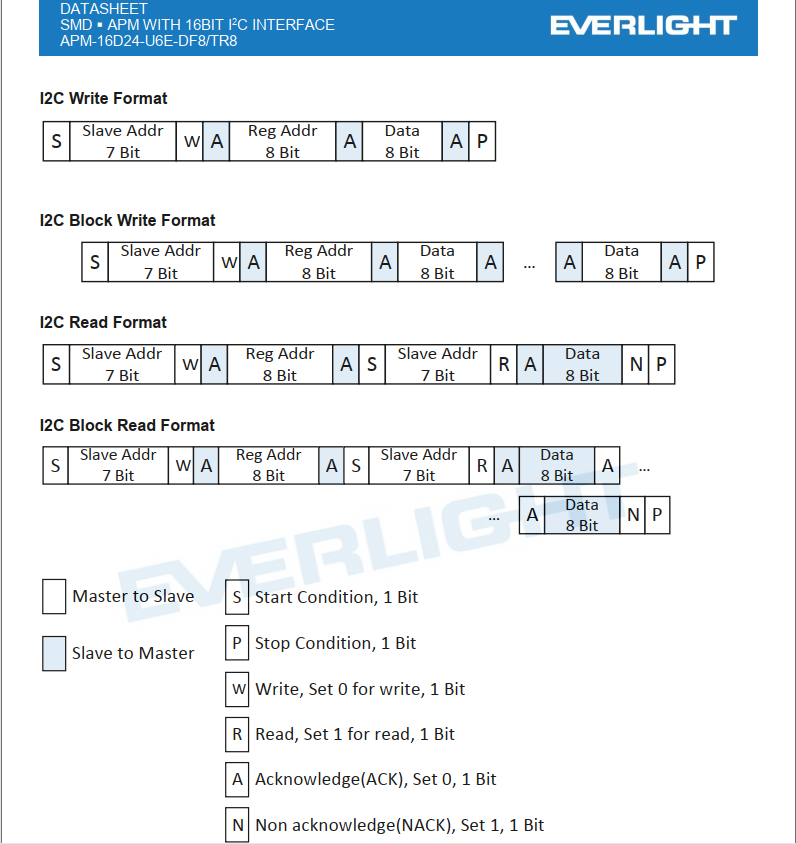
Vishay 和 亿光 接近传感器模块对比 Vishay使用VCNL3682S型号芯片,亿光使用APM-16D24-U6E型号芯片,I2C协议对比。
Vishay :
亿光:
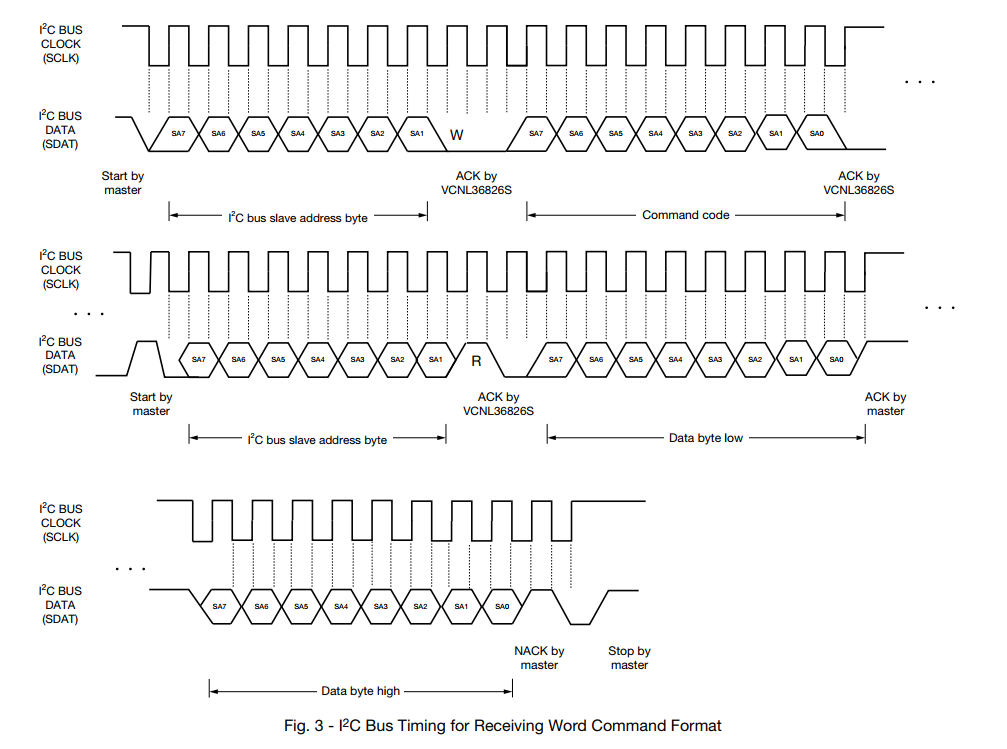
对比波形 对比协议来看基本上是一致的,用JI2C工具测的i2c波形也基本上一致,但是我自己写的软件i2c驱动,Vishay可以正常使用,亿光读取的数据就有问题,用逻辑分析仪抓一波波形分析一下。
发现每次读完都会多恢复一个ack,而协议上读完最后一个字节需要恢复nack。
修改了以下代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 static int i2c_send_ack_or_nack(struct drv_i2c_bit_ops *bus, int ack) { struct drv_i2c_bit_ops *ops = bus; if (ack) // if (ack >= 0) 改成 if (ack) SET_SDA(ops, 0); i2c_delay(ops); if (SCL_H(ops) < 0) { // logVerbose("ACK or NACK timeout." ); return -2; } SCL_L(ops); return 0; }
static int i2c_send_ack_or_nack(struct drv_i2c_bit_ops *bus, int ack){}
if(ack >= 0)表示每次都会回复ack/nack
if(ack)表示除最后一次数据不回复,其他每次都会回复ack/nack